|
КОСМОДРОМ - Электронные компоненты для разработки и производства - Харьков - Украина
|
 |
| | | | 
Нажми на картинку, чтобы увеличить ее
Фото может отличаться от реального вида предмета, но это не влияет на основные характеристики изделия |
Временно нет на складе...
код товара:
Кол-во | Цена без НДС, грн | Купить |
| Раздел:
| | | |
|
CAN
(Control Area Network) - последовательная магистраль, обеспечивающая
увязку в сеть "интеллектуальных" устройств ввода/вывода, датчиков и
исполнительных устройств некоторого механизма или даже предприятия.
Характеризуется протоколом, обеспечивающим возможность нахождения на
магистрали нескольких ведущих устройств, обеспечивающим передачу данных
в реальном масштабе времени и коррекцию ошибок, высокой
помехоустойчивостью. Система CAN в настоящее время широко используемых в
автоматизации промышленности. |
|
 |
| |
|
|
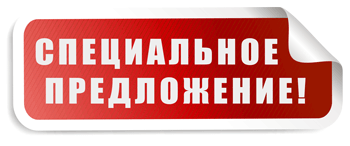
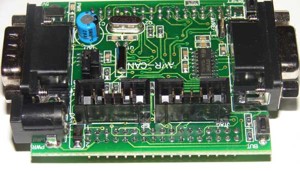
Плата AVR-CAN
предназначена для простого старта с AT90CAN128 - микроконтроллера от
ATMEL с CAN интерфейсом. Плата имеет очень компактный размер 60х55мм.
Наличие интерфейсов CAN и RS232 дает возможность пользователю легко
создавать мост между CAN и UART. Все порты микроконтроллера выведены
на разъемы, что позволяет легко добавить к плате нужную схему или
подключить к другой плате. |
|
|
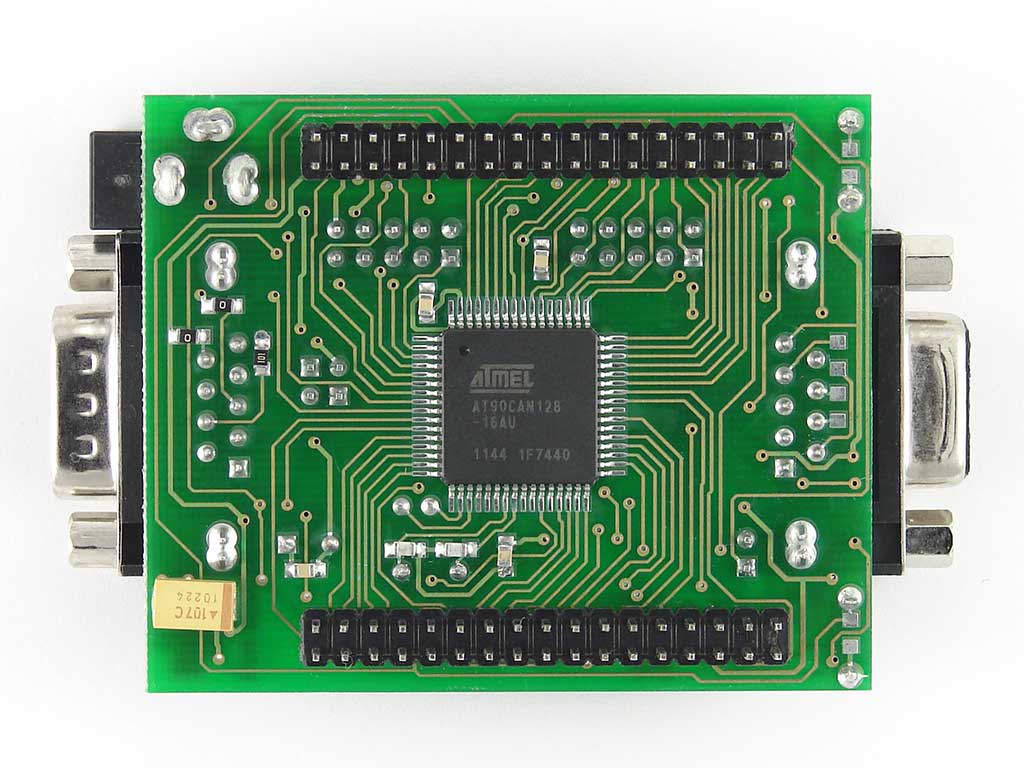
Особенности:
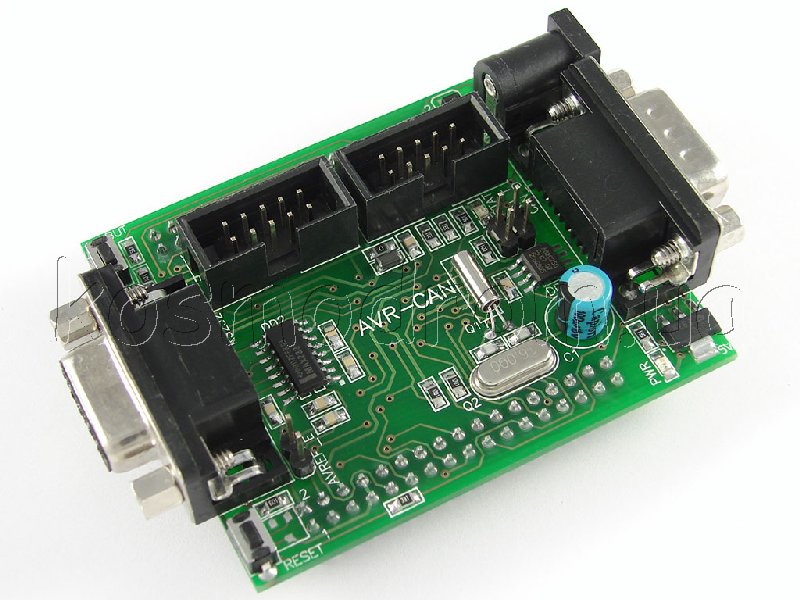
- Микроконтроллер: AT90CAN128 - 128Kb Flash, 4Kb EEPROM, 4Kb SRAM, 53 порта
ввода/вывода, CAN контроллер, RTC, 4 таймера/счетчика с PWM, 2 UART
интерфейса, 8-канальный 10-битный АЦП, Watchdog таймер, SPI интерфейс, JTAG
интерфейс, 5 режимов энергосбережения
- стандртный JTAG разъем для программирования и отладки с помощью
AVR JTAG BOX и
LITE программатора/отладчика
- стандартный ISP разъем для подключения
AVR ISP программатора
- RS232 интерфейс
- CAN интерфейс
- Пользовательская кнопка
- Светодиод , подключенный к порту контроллера
- 8МГц кварцевый резонатор
- 32768 Hz кварцевый резонатор
- Цепь сброса с кнопкой
- Стабилизатор напряжения 5В
- Светодиод состояния питания
- Гнездо подключения питания
- Все выводы микроконтроллера подключены к внешним разъемам
- Высококачественная печатная плата с маской зеленого цвета и белой
маркировкой
- Размеры 65х55мм |
 |
|
Цепь питания:
Напряжение питания 5..9В должно подаваться через разъем питания PWR (+ на
центральный контакт), либо через соответствующие контакты разъема EXT1 (см.
схему)
Ток потребления платы 40-50мА |
 |
|
Описание
положения джамперов:
- CAN_D: Выключение CAN интерфейса. Если этот джампер установлен, CAN шина
не работает. Нормальне положение джампера - разомкнутое
- CAN_T: Подключает нагрузочный резистор 120 Ом в САN шину. Джампер следует
устанавливать, только если плата является конечным устройством на шине CAN
- AVREF_E: При установленном джампере напряжение VDDA подается на вывод
контроллера AVREF в качестве опорного напряжения АЦП. Если джампер не
установлен, опорное напряжение должно быть подано на вывод EXT2-3 разъема
EXT2. |
|
Документация:
- AVR-CAN
схема
-
AVR-CAN расположение компонентов
- AT90CAN128 datasheet
http://www.atmel.com/dyn/resources/prod_documents/doc7679.pdf |
 |
|
Примеры программ:
1.Библиотека для AT90CAN128 (WinAVR) – официальная публикация ATMEL
http://www.atmel.com/dyn/resources/prod_documents/at90CANLIB_3_2.zip
2.Мигающий светодиод (Исходник
и HEX)
3.Кнопка и светодиод (Исходник
and HEX) |
| | |
|
Поставляемые компоненты









|
^ Наверх
радиошоп, radioshop, радио, радиодетали, микросхемы, интернет, завод,
комплектующие, компоненты, микросхемы жки индикаторы светодиоды семисегментные датчики влажности преобразователи
источники питания тиристор симистор драйвер транзистор, диод, книга, приложение,
аудио, видео, аппаратура, ремонт, антенны, почта, заказ, магазин,
интернет - магазин, товары-почтой, почтовые услуги, товары, почтой, товары
почтой, каталог, магазин, Internet shop, база данных, инструменты, компоненты,
украина, харьков, фирма Космодром kosmodrom поставщики электронных компонентов дюралайт edison opto светодиодное освещение Интернет-магазин радиодеталей г.Харьков CREE ATMEL ANALOG DEVICES АЦП ЦАП